Locally launched tests
When Robot launch configuration is launched, it setups a simple server inside RED instance to which execution events can be send from tests. Then it automatically starts the tests choosing suites/tests which has to be executed from the configuration. The tests are either started using some kind of python interpreter or using user-defined script.
Robot launch configuration
Open
Run -> Run Configurations... dialog and under Robot element create new configuration. The
configuration itself is using couple of tabs:
- Robot - where project in use should be specified, as well as suites and/or tests to be executed; tags used to include or exclude tests and additional arguments provided by user,
- Listener - where agent connection type and its parameters is specified,
- Executor - where executable for the tests are specified
- Environment - where environment variables for robot process can be specified (if nothing is specified the variables are inherited from RED/eclipse environment variables).
Robot tab
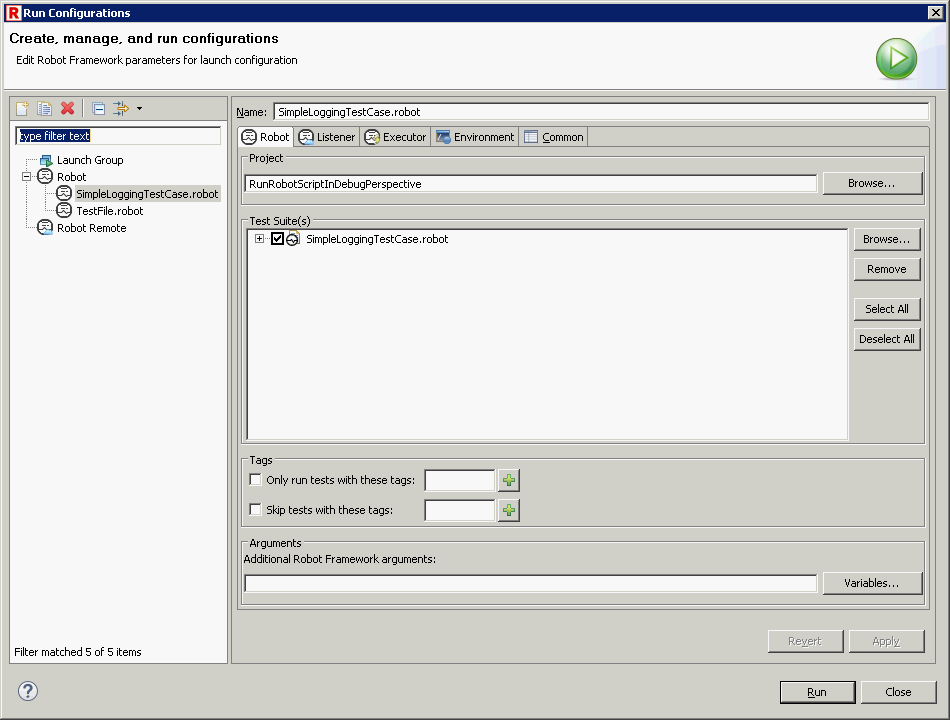
At this tab following arguments can/have to be specified:
- project - the path to project will be passed to robot as the data source to be executed,
- test suite(s) - suites can be specified by adding files or directories, those entries will
be translated to
--suitearguments for Robot. Additionally when file suite is added the tests inside it can be chosen/excluded from execution, which translates to--testargument entries in command line call, - only run tests with these tags - test cases to be executed are filtered by tag, this setting
translates to
--includeargument of command line call, - skip tests with these tags - test cases can be excluded from execution based on tags,
this setting translates to
--excludeargument of command line call, - additional Robot Framework arguments - additional arguments to be passed to Robot can be specified here.
- Note
- Additional arguments field accepts Eclipse string variables.
Listener tab
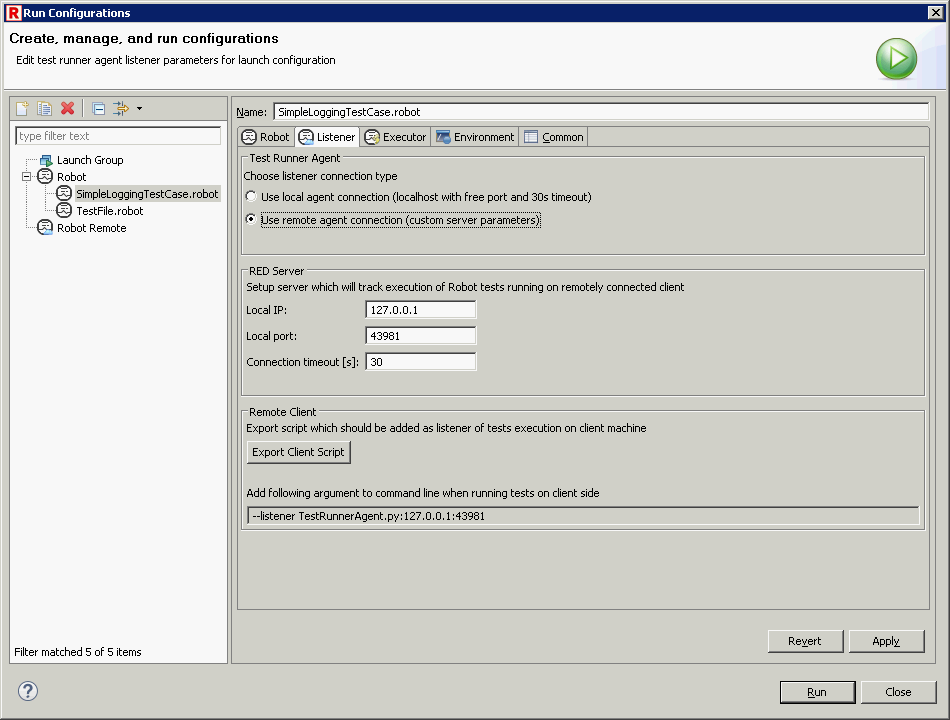
At this tab, one can specify how RED will setup the server for execution tracking. By default it will use localhost and random free port to start the server and wait for connection, but other host, port and timeout can be specified. This is especially useful when used together with scripted launch, when the script is setting up agent connection in its own way.
Executor tab
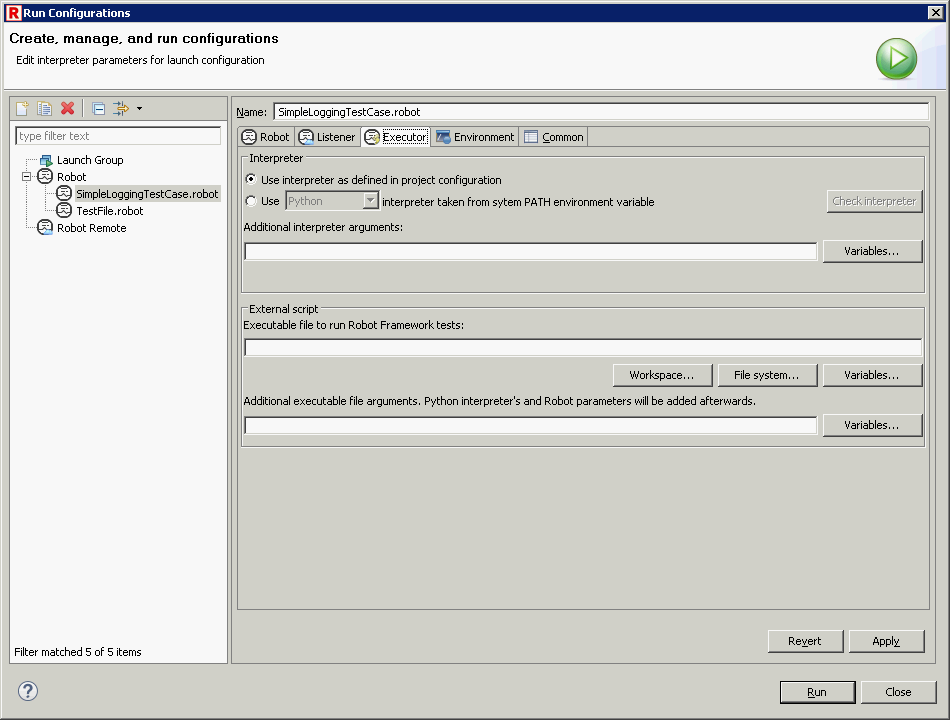
At this page executable for Robot tests may be configured. Firstly either python interpreter defined
by project can be used (the one defined in red.xml file of a project, or in preferences if red.xml does
not specify it), or interpreter taken from PATH environment variable. Additionally
freely defined arguments can be passed to interpreter.
Moreover, the whole call can be passed to a script (or other executable) with additional arguments. The script/executable's command line parameters are the same as RED command line during normal test execution (path to python interpreter with robot call, parameters for suites/testcases etc.). Such script/external executable mechanism can be used to wrap Robot execution into other tools.
For more information read Local launches scripting topic in this guide.
- Note
- Additional arguments and executable file path fields accept Eclipse string variables.
Environment tab
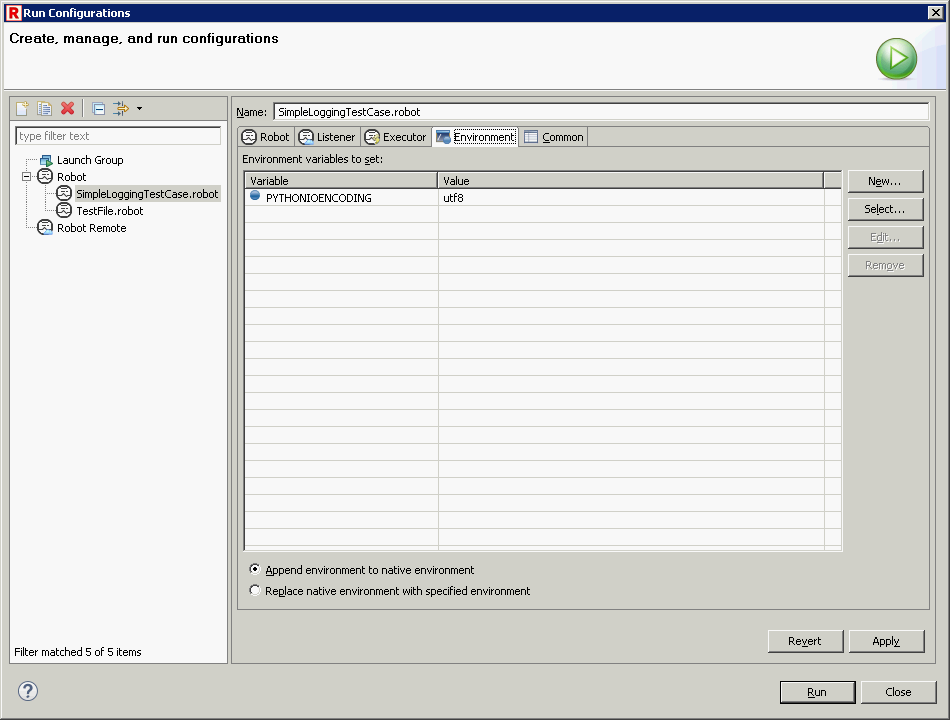
At this tab environment variables can be specified for robot tests process. There are 3 possibilities:
- no variable is specified (default) - the robot process will be launched with variables inherited from running RED/eclipse instance,
- variable(s) specified, in append mode - the robot process will be launched with variables inherited from running RED/eclipse, but with specified variables appended,
- variable(s) specified, in replace mode - the robot process will only get those variables which are defined in table.
Launching tests
When configuration is properly set it may be launched either in debug or run mode. RED will take care of setting up both server and agent as well as running the tests.
Debugging local launches
When local configuration is launched it already have agent script passed as a listener, so the agent is sending debug information back to RED during execution. Working with debugger is described in debugging robot topic.