Debugging Robot & Python with RED & PyDev
It is possible to setup debugging sessions on both Robot and Python code levels using RED together with PyDev in single RED/Eclipse instance.
Prerequisites
- Any Eclipse-based installation with both RED and PyDev installed,
- the
pydevddebugger module - this is provided by PyDev or manually, can be also installed into Python withpip, - the
redpydevdrunner script - this is provided by RED or manually.
In order to setup debugging sessions proper launch configuration needs to be created. In order to do this
one can simply run a wizard:
New -> Other -> Robot Framework -> RED with PyDev debugging session. The launch configuration
created by this wizard will be created for selected suites inside project (if there is a suite selected in Project
Explorer view).
Wizard
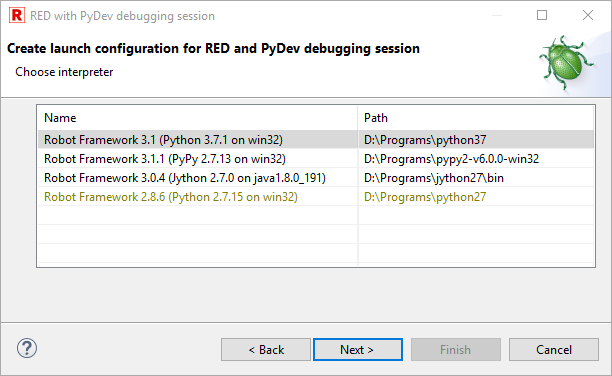
Choosing Python interpreter
First page of wizard allows to choose any environment from those defined in Preferences. It will be used
to execute the redpydevd runner script and effectively the chosen Robot suites.
Choosing redpydevd module
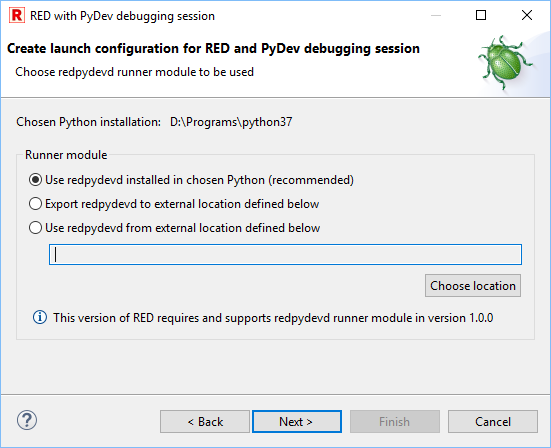
Second page allows to choose which redpydevd script should be used. There are 3 possibilities:
- The one installed in chosen Python interpreter - if there is no
redpydevdinstalled or is outdated (in different version than currently supported) then RED will usesdistandpipto install that module (offline), - the one exported to chosen location in your system - the script file will be written in this location and used by created launch configuration,
- the one already existing in chosen location.
- Note
- The version of
redpydevdmodule expected by RED is displayed at this wizard page. Make sure to use the same version if you're using already existing script exported to local location some time ago.
Choosing pydevd module
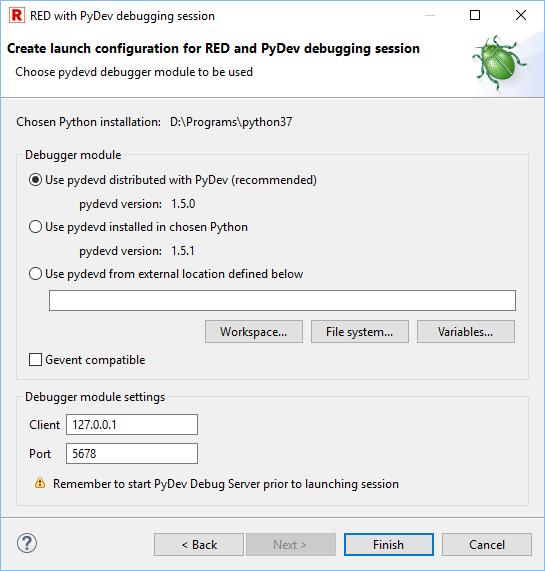
Last page allows to choose which pydevd module should be used. There are 3 possibilities:
- The one distributed with PyDev - this option is recommended because it ensures that the version of module is the same as PyDev would expect; this option may be disabled if the module couldn't be located in your PyDev installation,
- the one installed in chosen Python interpreter - this option is disabled if
pydevdis not installed. You need to manually install it usingpipto enable it. Not that the version may be different than the one provided by PyDev as visible on screen above, - the one already existing in chosen location - if you happen to download
pydevdfrom elsewhere.
It is also possible to set the address and port on which PyDev will communicate with the module.
- Warning
- If the libraries you are going to debug use
Geventlibrary then please select Gevent compatible checkbox. This will addGEVENT_SUPPORTenvironment variable set toTrue. It is required forpydevdin order to be able to debug such libraries. Without this the debugger sessions may hang.
Created launch configuration
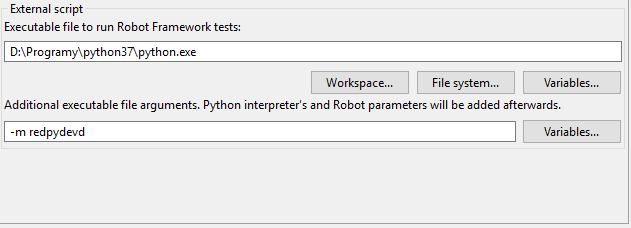
After clicking Finish RED will install or export redpydevd runner (if neeeded) and create
new launch configuration with prefilled External script settings at Executor tab. For example:
Debugging
In order to be able to debug: the project and suite(s) needs to be defined at Robot tab of launch configuration. It may be already defined if suite was selected in Project Explorer view when starting wizard. Next one need to:
- Put a breakpoint either in selected suite code (.robot file) or in Python code. Note that PyDev requires Debug perspective to be first activated (see: PyDev Remote Debugger User Guide).
- the Python debug server needs to be started. This can be done manually:
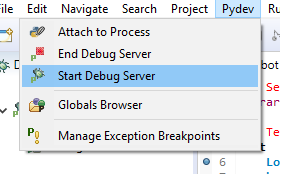
or automatically if proper PyDev preference is enabled (Preferences -> PyDev -> Debug -> Remote debugger server activation). - the address and port passed by launch configuration for Python debugger need to be the same as PyDev is using (only needed if changed to non-default),
- launch created configuration in debug mode.
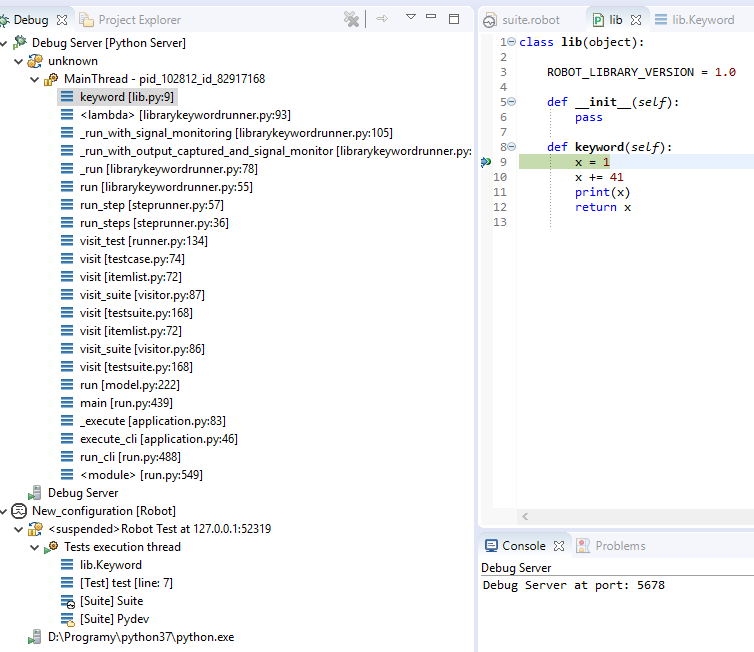
After launching one should see Robot debugger stopping at breakpoint:
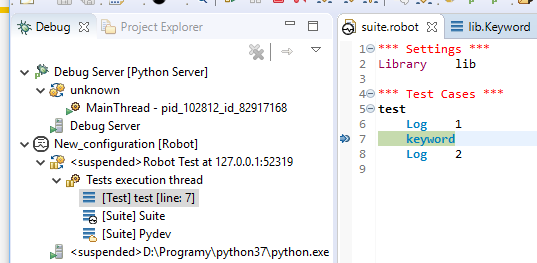
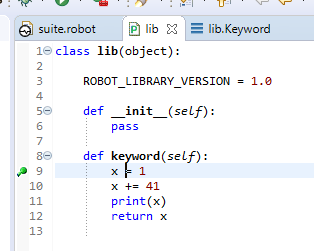
In this example the keyword keyword comes from tiny local library. Once Step Into (F5)
is executed the editor should open:
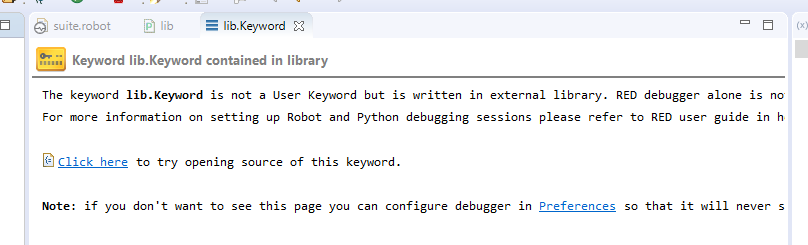
This dummy editor explains that RED debugger cannot go into library keywords code on it's own but PyDev can be used cooperate and be able to debug Python-level code. One can use Click here and RED should open Python script where keyword is defined:
Put a breakpoint there and resume Robot code execution. Now PyDev debugger should pause allowing to debug Python code (note there are two sessions in Debug view - one of PyDev operating on Python code and second of RED operating on RF code):